

Addthis

AWAC is a current profiler and wave directional system. It provides water speed, module and direction at different depths. AWAC is situated next to the exit of The Olympic Harbour of Barcelona.
This device is being used to interconnect the coastal current effect in gaining/losing sand balance in the beaches.

The Nortek AWAC provides a current profiler and wave directional system in one unit. It can measure the current speed and direction in 1-m thick layers fron the bottom to the surface and you can measure long waves, storm waves, short wind waves, or transient waves generated by local ship traffic.
The AWAC is designed as a coastal monitoring system. It can be operated online or in stand-alone mode with an internal recorder and batteries. The mechanical design is all plastic and titanium to avoid corrosion. The sensor is usually mounted in a frame on the bottom, protected from the harsh weather and passing ship traffic.
AWAC Wave Measurements
Optimized wave data collection measurements begins with a vell designed instrument. The AWAC measures three different wave quantities that allow us to arrive the estimates of wave height and wave period. These quantities are pressure, wave orbital velocity, and surface position. The pressure is measured by the Doppler shift along each beam. The surface position is measured with Acoustic Surface Tracking (AST), a special mode where the instruments acts as an inverted echo sounder.
The fact waves are random event requires that measurements are made over defined periods of time, or burst. Typically these bursts are 512, 1024, or 2048 seconds un length and sampled at 1-4 Hz.
The measurements cells and the AST window are adaptively configured during the current profile which inmediately precedes the wave burst. The position and size of the velocity cell as well as the AST window are determined based on the minimum pressure. By adaptively configuring the burst measurements, the AWAC not only ensures a maximized signal level and data quality for widely varyng wave conditions, but also permits the AWAC to automaticaly account for extreme tidal variations.
Wave Processing
The non directional wave estimates are available from the three independent spectra: pressure, velocity, and AST. The frequency range of these estimates increases respectively: pressure, velocity, AST.
The determination of wave directional estimates is a litte more complicated, and may be performed with either the Maximum Likelihood Method (MLM) or a special triplet solution known as the SUV method. The MLM exploits the time-lag between the array of the three spatially celarated velocity and AST measurements to determine wave direction.
The solution attempts to determine the direction that provides the best agreements between all four of these measurements. This calculation is performed at discrete frecuencies. The end result is a description of the energy distribution in both direction and frequency.

One distinct advantage of using array measurements, is that the method is capable of resolving waves at the same frequency coming from two different directions. One scenario would be identifying incident and reflected waves from a coastal structure.
The SUV approach differs from the MLM approach in the sense that it uses the measurements as a triplet (Similar to a wave buoy or PUV instrument). The triplet is composed of the AST and the horizontal velocity estimates of U and V. The advantage of the SUV method is that the AWAC may be mounted on a subsurface buoy allowing it to rotate freely, which is not possible with array solutions like MLM. The ability to mount the AWAC on a subsurface buoy comes from the fact that the be tilt and heading sensors are sampled at a similar rate as the wave measurements, and as a result the estimates may be converted to an Earth frame of reference.
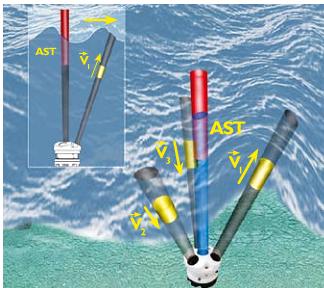
The AWAC measures three different wave quantities that allows us to arrive at the estimates of wave height and wave period. These quantities are pressure, wave orbital velocity, and surface position. The pressure is measured with a high resolution piezo-resistive element. The orbital velocity is measured by the doppler shift along eack beam. The surface position is measured with Acoustic Surface Tracking (AST), a special mode where the instrument acts as an inverted echo sounder.
AST defined.
For AST it all lies in a dedicated vertical beam where a short acoustic pulse is trasmitted by the center beam and the return is finely resolved such that a sub centimeter resolution is achieved.
The AST is not subjected to attenuation as the velocity and pressure signals, so it provides a direct measurement ot the free surface. This means that the AWAC is not limited to measuring just the long waves, but all ocean waves. Resolvable wave periods can be as low as 0.5 seconds.
Apart from circumventing the limitations associated with measuring and attenuated quantity, the AST provides a time series of the free surface which allows for enriched data analysis. This includes identifyng nonlinear waves, evaluating transient waves (ship wake), and important time series estimates such Hmax, H10, Tmean, Tmax, etc. These estimates are unique to AST and cannot be properly determined with just the velocity or pressure measurements. Furthermore, when the AST is included in the MLM solution, the directional estimates becomes much more accurate than without the AST.
Current meter data are transferred in real time at the Research Institute throught SATELLINE 3AS-869 radio modem.
